[ Python ] Color Detection
이미지 연산 방법을 통해 영역을 찾는 방법 중 두번째로 객체의 색상을 이용하여 검출하는 방법에 대해 알아 보겠습니다.

Import packages
import cv2 import numpy as np from scipy.spatial import distance as dist import imutils import matplotlib.pyplot as plt
Function declaration
Jupyter Notebook 및 Google Colab에서 이미지를 표시할 수 있도록 Function으로 정의
def img_show(title='image', img=None, figsize=(8 ,5)): plt.figure(figsize=figsize) if type(img) == list: if type(title) == list: titles = title else: titles = [] for i in range(len(img)): titles.append(title) for i in range(len(img)): if len(img[i].shape) <= 2: rgbImg = cv2.cvtColor(img[i], cv2.COLOR_GRAY2RGB) else: rgbImg = cv2.cvtColor(img[i], cv2.COLOR_BGR2RGB) plt.subplot(1, len(img), i + 1), plt.imshow(rgbImg) plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show() else: if len(img.shape) < 3: rgbImg = cv2.cvtColor(img, cv2.COLOR_GRAY2RGB) else: rgbImg = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) plt.imshow(rgbImg) plt.title(title) plt.xticks([]), plt.yticks([]) plt.show()
Color 을 판단하는 Function (이 부분을 수정하여 특정 Color만 추출을 하는 기능을 구현할 수도 있습니다.)
def color_label(image, c): # 윤곽선에 대한 마스크를 구성한 다음 영역에 대한 평균 L*a*b* 값을 계산 mask = np.zeros(image.shape[:2], dtype="uint8") cv2.drawContours(mask, [c], -1, 255, -1) mask = cv2.erode(mask, None, iterations=2) mean = cv2.mean(image, mask=mask)[:3] # 정의한 색상 L*a*b* Array를 loop로 수행하여 L*a*b* 색상 값과 이미지 평균 사이의 거리를 계산하며 # 최소 거리의 L*a*b* 색상 값을 찾음 min_dist = (np.inf, None) for (i, row) in enumerate(lab_array): d = dist.euclidean(row[0], mean) if d < min_dist[0]: min_dist = (d, i) return color_names[min_dist[1]]
Load Image
cv2_image = cv2.imread('asset/images/color.jpg', cv2.IMREAD_COLOR) img_show('original image', cv2_image)
Color Detection
Key는 색상명, Value는 RGB값을 tuple로 색상 dictionary를 정의합니다.
colors_dict = {"Red": (255, 0, 0), "Green": (0, 255, 0), "Blue": (0, 0, 255)}
RGB color space를 L*a*b* color space로 변환 (RGB나 HSV가 아닌 L*a*b* 를 이용하는 이유는 선택된 객체의 색상의 어떤 색상과 가까운지 측정하기 위해 유클리디안 거리(Euclidean Distance) 측정 방식을 사용하기 때문입니다.)
유클리디안 거리(Euclidean Distance) 혹은 유클리드 거리 측정 방식이라 불리는 이 알고리즘은 단순히 값들 간의 거리를 구하는 방법입니다. 간단히 파타고라스 정의와 같이 삼각형을 만들어서 계산하는 방법인데 다른 점은 여러차원의 거리를 계산 할 수 있다는 것입니다.
lab_array = np.zeros((len(colors_dict), 1, 3), dtype="uint8") color_names = [] for (i, (name, rgb)) in enumerate(colors_dict.items()): lab_array[i] = rgb color_names.append(name) lab_array = cv2.cvtColor(lab_array, cv2.COLOR_RGB2LAB)
아래 과정을 통해 이미지를 그레이스케일로 변환하고 노이즈를 줄이기 위한 이미지 블러링 후 이진화 합니다.
resized = imutils.resize(cv2_image, width=640) ratio = cv2_image.shape[0] / float(resized.shape[0]) blurred = cv2.GaussianBlur(resized, (5, 5), 0) gray = cv2.cvtColor(blurred, cv2.COLOR_BGR2GRAY) lab_img = cv2.cvtColor(blurred, cv2.COLOR_BGR2LAB) thresh = cv2.threshold(gray, 10, 255, cv2.THRESH_BINARY)[1] img_show(['GaussianBlur', 'L*a*b* color', 'Threshold'], [blurred, lab_img, thresh])
이진화 이미지에서 윤곽선을 검출합니다.
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = imutils.grab_contours(cnts)
추출된 윤곽선을 기준으로 Color을 판단하여 이미지에 표시합니다.
cv2.moments는 객체의 무게 중심이나 면적 등을 계산할 때 유용합니다. 모멘트 종류는 3가지이며 아래와 같이 총 24개의 값을 가집니다.
- 공간 모멘트(Spatial Moments) : m00, m10, m01, m20, m11, m02, m30, m21, m12, m03
- 중심 모멘트(Central Moments) : mu20, mu11, mu02, mu30, mu21, mu12, mu03
- 평준화된 중심 모멘트(Central Normalized Moments) : nu20, nu11, nu02, nu30, nu21, nu03
{'m00': 21314.0, 'm10': 10380260.0, 'm01': 2770943.0, 'm20': 5107832193.666666, 'm11': 1349493701.0, 'm02': 387515034.0, 'm30': 2538712455460.0, 'm21': 664048224844.1666, 'm12': 188726812226.33334, 'm03': 57471376407.5, 'mu20': 52479014.17900467, 'mu11': -1.973632574081421, 'mu02': 27276453.290184796, 'mu30': -26011.04541015625, 'mu21': 565031.7590560913, 'mu12': 773196.0624542236, 'mu03': -6977.8613204956055, 'nu20': 0.11551961832262529, 'nu11': -4.34446578758714e-09, 'nu02': 0.06004239070743966, 'nu30': -3.921889956072085e-07, 'nu21': 8.5194283649921e-06, 'nu12': 1.1658085338737212e-05, 'nu03': -1.0521070489935076e-07}
vis = cv2_image.copy() # loop over the contours for c in cnts: # cv2.moments를 이용하여 객체의 중심을 계산 M = cv2.moments(c) cX = int((M["m10"] / M["m00"]) * ratio) cY = int((M["m01"] / M["m00"]) * ratio) # 이미지에서 객체의 윤곽선과 Color를 표시 color = color_label(lab_img, c) c = c.astype("float") c *= ratio c = c.astype("int") cv2.drawContours(vis, [c], -1, (0, 255, 0), 10) cv2.circle(vis, (cX, cY), 20, (0, 255, 0), -1); cv2.putText(vis, color, (cX-80, cY-50), cv2.FONT_HERSHEY_SIMPLEX, 2, (255, 255, 255), 5)
Color를 표현한 이미지를 확인합니다.
img_show('Color Detection', vis, figsize=(16,10))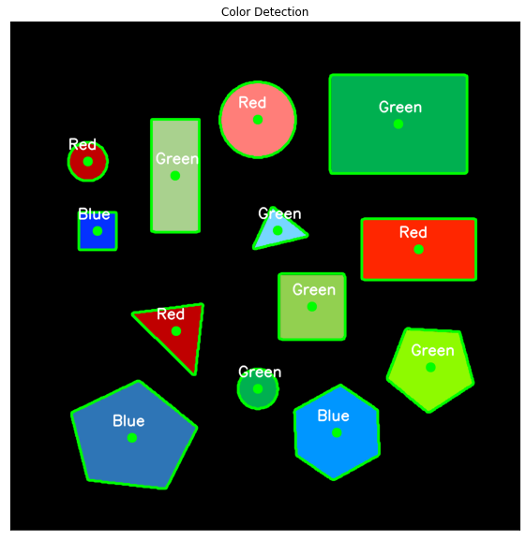
색상의 유사도를 이용한 방식 역시 단점은 있습니다. Color Detection을 위해 사용한 L*a*b* 에서 L*는 값의 밝기, a*는 빨강과 초록 중 어느쪽으로 치우쳤는지, *b 는 노랑과 파랑 중 어디로 치우쳤는지를 나타냅니다. L*a*b* 색 공간은 RGB나 CMYK가 표현할 수 있는 모든 색상을 포함하여 나타낼 수 있고 인간이 지각할 수 없는 색상도 나타낼 수 있습니다. 하지만 위에서 우리가 정의한 color_dict의 경계에 모호한 경우는 사람이 인지하는 색상의 분류와 다르게 판단 될 수도 있습니다.
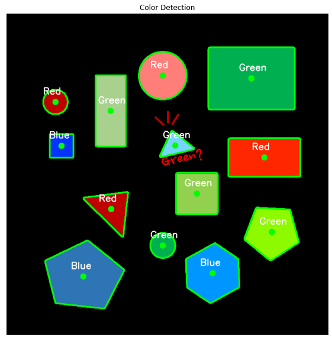
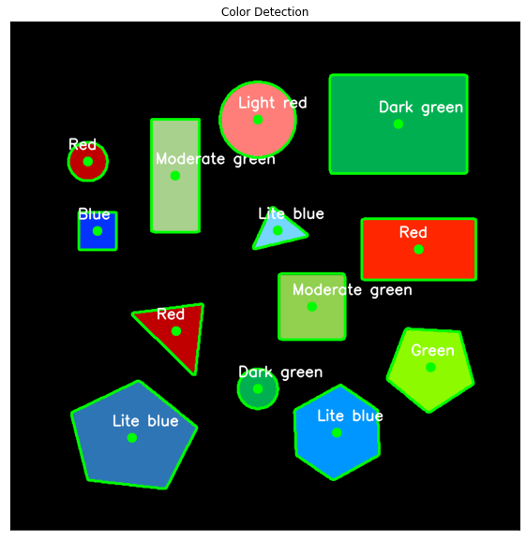
경계가 모호한 경우 잘못된 색으로 판단 될 수 있습니다. 색상을 좀 더 세분화 한다면 더 나은 결과를 얻을 수 있습니다.
colors_dict = {"Red": (255, 0, 0), "Green": (0, 255, 0), "Blue": (0, 0, 255), "Lite blue": (118, 214, 255), "Moderate green": (146, 208, 80), "Dark green": (0, 176, 80), "Light red": (255, 126, 121),}
'Tech & Development > AI' 카테고리의 다른 글
| [ Python ] Template Match Detection (0) | 2022.11.25 |
|---|---|
| [ Python ] Bright Spot Detection (0) | 2022.11.24 |
| [ Python ] Shape Detection (0) | 2022.11.23 |
| Train Swin-Object Detection using Custom Data(without mask) (1) | 2022.08.02 |
| CartoonGAN을 이용하여 일본 애니메이션 그림 만들기 (0) | 2022.03.15 |
댓글을 사용할 수 없습니다.